Analyse et comparaison des systèmes de localisation de défaut dans les réseaux électriques CA
Dans les réseaux électriques CA modernes la localisation rapide et précise de la localisation des défauts de ligne devient encore plus importante. Il faut réduire les durées des indisponibilités causées par les défauts permanents, et la localisation précise de la position du défaut est nécessaire à la une exploitation optimale du système électrique. Pour les défauts fugitifs, suivis d'un ré-enclenchement réussi, la localisation correcte du défaut permet d'entreprendre une maintenance préventive pour éviter de nouvelles occurrences de défaut à ce même endroit. Se rendre rapidement sur le lieu du défaut et avoir la possibilité de corréler avec précision le résultat de la localisation avec les données de foudre, des incendies de végétation, et d'autres phénomènes, aide beaucoup, quand des contournements se produisent, à identifier la cause à l'origine, et ceci est d'une grande importance dans les relations avec le régulateur.
Chef de file
(SE)
S. SEFIDPOUR
Secrétaire
(US)
A. MONTENEGRO
D. SPOOR (AU), M.A.M. RODRIGUES (BR), SH. SHI (CN), A. VAINIONPÄÄ (FI), S. MAMODALY (FR), F. RIOS (SE), V. TERZIJA (UK), A. GUZMAN (US)
Membres Correspondants : ZH. LI (CN), A. WAHLROOS (FI), T. MIYOSHI (JP), A. BAJRACHARYA (NZ), CH.S. MELAAEN (NO), M. DRAGOMIR (RO), A. PODSHIVALIN (RU), P. KELLER (ZA), D. COLE (UK), Y. DONG (US), J. GOSALIA (US), R. DAS (US)
Introduction
Différentes méthodes de localisation des défauts impliquent différents niveaux d'investissement; les 40 utilités du monde entier interrogées par le Groupe de Travail (GT) ont présenté plusieurs méthodes. Elles allaient d'une solution simple, de faible coût, à des solutions plus coûteuses, avec des systèmes sophistiqués mettant en œuvre de multiples techniques pour améliorer leur performance.
Parmi les méthodes de localisation de défaut disponibles aujourd'hui, les techniques basées sur la mesure d'impédance et sur les ondes mobiles sont les utilisées dans les réseaux CA de transport et de transport régional. Cependant, dans les réseaux de distribution, les indicateurs de circuit en défaut (FCI) et l'appel à des patrouilles de terrain sont encore la technique de localisation la plus usitée.
Les localisateurs de défaut basés sur les techniques de la mesure d'impédance et des ondes mobiles reposent sur des technologies numériques pour traiter les signaux de courant et/ou de tension des transformateurs de mesure et de leurs interfaces. Les signaux sont traités localement, dans le dispositif installé quand les mesures viennent d'une seule extrémité, ou dans un point central quand des canaux de communication collectent les données de différentes sources.
Chaque technique de localisation de défaut présente ses propres avantages et inconvénients, en fonction des différentes topologies des réseaux dans lesquels elle est mise en œuvre. Les méthodes utilisant des données synchrones et non synchrones de multiples points/terminaux sont habituellement préférées. L'apparition de solutions de communication économiques et l'accroissement des capacités de calcul numérique permettent aux utilités de constater l'amélioration des performances de ces techniques sophistiquées et d'obtenir des résultats plus précis, dans un temps plus court, dans le poste ou dans le centre de conduite.
Quand des utilités veulent mettre en place un système de localisation de défaut adéquat, il est important qu'elles aient une bonne connaissance des différentes techniques disponibles et de leur utilisation pour différentes topologies de réseaux électriques. La Brochure Technique (BT) passe en revue les techniques de localisation de défaut couramment utilisées et présente les aspects pratiques de leur mise en place. Perfectionner la précision de la localisation de défaut en incorporant des données géographiques et environnementales, et des impacts d'exploitation liés aux résultats de la localisation, est un aspect qui a été pris en compte dans la BT, comme les tendances en matière de localisation de défaut du futur. A la fin de la BT on fournit également les résultats de l'enquête lancée par le GT.
Structure de la Brochure Technique
La BT comporte les chapitres suivants :
- §1 présente les défis de la localisation des défauts et les sources possibles d'erreurs, telles que la résistance du défaut, les imprécisions sur les paramètres des lignes, les transformateurs de mesure, la non-homogénéité du système électrique, etc.
- §2 analyse les techniques, connues et couramment utilisées, de localisation de défaut. Il décrit dans le détail les approches basées sur les mesures d'impédance de la ligne en défaut, sur les ondes mobiles, sur les indicateurs de circuit en défaut, et sur l'observation des lignes par des équipes de terrain.
- §3 donne des informations sur la mise en œuvre et des instructions sur l'utilisation, traitant des problèmes liés aux transformateurs de mesure, des lignes à plusieurs bouts et des circuits non-homogènes, de la compensation série, de la transposition de ligne, ainsi que des problèmes particuliers des réseaux de distribution. On trouve également dans ce chapitre des données réelles de terrain et de formes d'onde, pour expliquer les différentes techniques de localisation de défaut.
- §4 traite de l'utilisation des cartes géographiques, et des informations des systèmes de surveillance des impacts de foudre et des incendies de végétation, qui sont une aide pour les activités de localisation de défaut.
- §5 couvre les aspects opérationnels associés à l'utilisation des informations de localisation de défaut, tels que les ré-enclenchements automatiques.
- §6 parle des tendances pour le futur, avec l'usage des méthodes centralisées de localisation de défaut basées sur des modèles.
- §7 présente les résultats obtenus au moyen des pratiques existantes de localisation de défaut, provenant des réponses fournies par les 40 utilités interrogées.
- §8 est dédié à la conclusion et à des recommandations pour l'amélioration des systèmes de localisation de défaut.
Méthodes de localisation de défaut
Les méthodes de localisation de défaut basées sur la mesure de l'impédance et sur les ondes mobiles sont celles qui sont le plus couramment mises en œuvre pour les lignes de transport. Quand elles utilisent des mesures provenant de toutes les extrémités des lignes et synchronisées en temps absolu, elles fournissent des résultats précis de localisation de défaut. La description des méthodes utilisant les mesures des deux extrémités synchronisées en temps absolu est décrite ci-après
Méthode basée sur les mesures d'impédance des deux extémités
L'algorithme le plus simple utilisant les mesures des deux extrémités utilise les phaseurs tension et courant des deux extrémités de la ligne, synchronisés par rapport au temps absolu, donné par un système global de navigation satellitaire comme le GPS, ou tout autre système équivalent. Pour les circuits dont les phaseurs tension et courant (et donc ceux des composantes symétriques) sont synchronisés, un algorithme simple, utilisant les mesures des deux extrémités, peut être adopté. Dans cette technique on admet que la tension en un point de la ligne est fonction de la distance du point de défaut. S'il n'y a qu'un défaut on peut établir deux équations aux extrémités de la ligne, les poser et les résoudre. Si on considère le réseau en défaut de la Figure 1, et si on suppose que les mesures sont synchronisées, les équations (1) et (2) définissent la tension VF au point du défaut F, tels qu'elles sont vues des extrémités de la ligne.
VF = VS – mZLIS (1)
VF = VR – (1–m)ZLIR (2)
où ZL est l'impédance de la ligne, et VS, VR, IS et IR sont les tensions et les courants aux extrémités de la ligne.
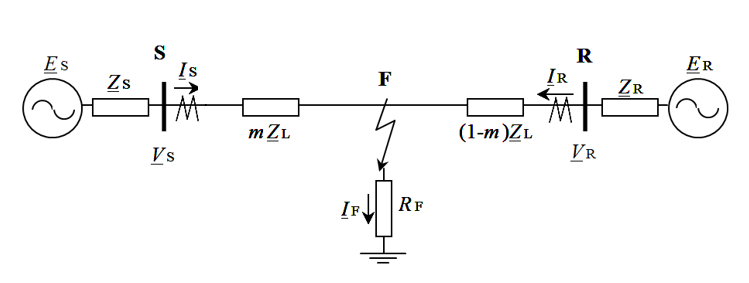
Figure 1 – Réseau simple à deux sources et défaut
Les équations (1) et (2) peuvent être résolues pour chacune des composantes symétriques, mais il vaut mieux habituellement les valeurs de la composante positive pour déterminer la position m du défaut, telle que donnée par (3).
m =│(VS1 – VR1 + ZL1IR1) / ZL1ID1│ (3)
où ID1 = IS1 + IR1 est le courant différentiel, VS1 et IS1 sont les tension et courant de la composante positive à l'extrémité S, et où de la même façon, VR1 et IR1 sont les tension et courant de la composante directe à l'extrémité R.
Cette méthode est très sensible aux erreurs de synchronisation des phaseurs. Les phaseurs des deux extrémités doivent être synchrones. Un décalage dans le temps, et par conséquent un décalage de phase, peut conduire à une erreur dans l'estimation de la distance. En général on accepte une erreur de phase de 3 degrés au plus.
Méthode basée sur les ondes mobiles depuis les deux extrémités
La méthode basée sur les ondes mobiles la plus populaire est la méthode des deux extrémités, avec synchronisation des temps aux extrémités, qui demande l'utilisation d'un système global de navigation satellitaire tel que le GPS. En plus il peut demander un ou deux canaux de transmission pour transmettre les données des deux stations d'enregistrement vers un point central (quand c'est le cas) ou vers une des extrémités de la ligne. Quand un défaut se produit les deux dispositifs d'ondes mobiles enregistrent le moment d'arrivée de l'impulsion transitoire initiale. On montre sur la Figure 2 les deux temps TS et TR. La position du défaut est ensuite déterminée à partir des différences entre les temps d'arrivée des deux fronts d'onde.
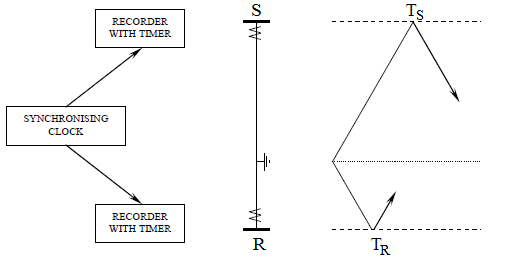
Figure 2 – Système de localisation de défaut par ondes mobiles depuis les deux extrémités
La distance depuis l'extrémité S peut être calculée selon (4) et la distance depuis l'extrémité R peut être calculée selon (5).
mS = L/2 + ∆T·(v/2) (4)
mR = L/2 – ∆T·(v/2) (5)
où L est la longueur de la ligne, v est la vitesse de propagation de l'onde mobile en mode aérien, et ∆T est égal à TS moins TR.
Enquête auprès des utilités sur les pratiques de localisation de défaut
Les informations collectées dans le cadre cette enquête proviennent de 40 utilités des différents continents. Trente-trois sont des Gestionnaires de réseau de transport (TSO), quatre sont des Opérateurs de systèmes de distribution (DSO), et trois sont des TSO/DSO. Les résultats de l'enquête peuvent être résumés comme suit :
- En moyenne, dans une utilité, six personnes sont impliquées dans des activités de localisation de défaut. Une des compagnies a répondu que 40 personnes participaient aux activités de localisation de défaut.
- La pratique la plus commune de mise à la terre est la connexion directe pour les réseaux de transport, et la connexion via une impédance (résistive ou inductive) pour les réseaux de distribution.
- La mesure d'impédance à partir d'une extrémité est la méthode de localisation de défaut la plus utilisée dans les réseaux de transport et de distribution.
- La recherche de la localisation des défauts est réalisée à 100% pour les défauts permanents et à 84% pour les défauts fugitifs.
- L'exigence de précision la plus couramment spécifiée est de 5% de précision relative et de 2 km en valeur absolue.
- Pour les localisateurs de défaut basés sur les ondes mobiles la précision absolue la plus couramment spécifiée est de 1 km.
- Beaucoup des utilités demandent que l'information de localisation du défaut soit disponible dans le délai le plus court possible. Les autres demandent à avoir l'information en moins de 30 minutes, en moins d'une heure ou en moins de 24 heures.
- Quand la méthode par mesure d'impédance est utilisée, 83% des utilités utilisent celle qui est disponible dans les relais de protection.
- Quand les localisateurs à ondes mobiles sont utilisés, ce sont pour 82% des localisateurs dédiés autonomes.
- D'après le retour des utilités la méthode la plus précise est la méthode des ondes mobiles aux deux extrémités, avec une erreur de localisation de moins de 300m.
- Parmi les problèmes rencontrés certains viennent pour des communications, de la synchronisation des temps, des erreurs de réglage et des modifications de topologie des réseaux.
Conclusion et Recommandations
Habituellement les estimations de la localisation des défauts sont obtenues à partir des relais de protection, des enregistreurs de défaut, et des localisateurs de défaut dédiés autonomes. Quand ces estimations sont imprécises, des analyses manuelles sont nécessaires pour améliorer les résultats des estimations. Quand c'est faisable, ces analyses doivent prendre en compte toutes les techniques d'estimation de la localisation des défauts qui sont appropriées à la topologie du réseau auquel appartient la ligne en cause, et devraient intégrer une possible corrélation avec des données géographiques et environnementales, et même avec les informations venant des clients. Et surtout, la performance de toute technique de localisation de défaut dépend aussi de la précision du modèle de la ligne, des erreurs de mesure, de la résistance de défaut et d'autres facteurs.
Other Technical Brochures