Guide pour le développement des modèles de simulation temps réel des études de fonctionnement des systèmes CCHT
La Brochure Technique (BT) 864 a pour objectif de fournir des instructions générales pour le développement de modèles de simulation temps réel (RTSM) destinés aux études de fonctionnement et de spécification des systèmes CCHT.
Chef de file
(CN)
Q. GUO
Secrétaire
(CN)
P. WANG
M. LIAO (CN), Z. SONG (UK), T. TIMM (DE), Y. ZHANG (CA), Y. VERNAY (FR), Z. WANG (CA), A. ZAMA (FR), W. ZIAD EL-KHATIB, W. WANG (CA), H. RAO (CN), J. JARDINI (BR), S. SANTO (BR), D. LIU (CN), G. LI (UK), F. ZERIHUN (BE), Y. ZHU (CN), D. SHEARER (SE), A. AL-MUBARAK (SA), A. SAUTUA (ES)
Membres Correspondants : D. MENZIES (CA), C. KRIEGER (DE)
Introduction
La simulation temps réel (RTS) est souvent utilisée pour réaliser des essais des systèmes de contrôle et de protection (C&P) intégrant des équipements matériels dans la boucle, destinés à vérifier leur conformité aux spécifications techniques, avant leur implantation sur site. Au cours de la dernière décennie la simulation RTS a été largement adoptée comme une méthode de réalisation des essais CCHT et des études systèmes à différentes étapes du développement des projets réels. Elle a été appliquée aussi bien pour des projets nouveaux que pour des projets de rénovation, dans les phases de conception, de construction, de mise en service, et même en exploitation.
L'efficacité de la simulation RTS est spécialement prononcée dans les situations où la modélisation d'un système C&P complexe, comportant la représentation précise de nombreuses interactions non-linéaires, peut être un challenge. En intégrant le système CP physique dans la boucle de simulation, ou une réplique du système C&P réel, le comportement fonctionnel et dynamique du système C&P réel peut être étudié, testé et vérifié sur une plateforme de simulation temps réel.
Bien que chaque système CCHT présente des caractéristiques spécifiques, il existe des similitudes dans les méthodes de modélisation RTS, dans la construction d'une réplique, et dans la réalisation les essais correspondants. C'est pourquoi la BT a pour objectif de proposer des directives générales pour le développement des modèles de simulation temps réel destinés aux études de fonctionnement CCHT destinés à analyser la conception et le comportement des systèmes C&P CCHT, et les problèmes complexes associés aux systèmes CCHT et aux systèmes CA qui leur sont connectés.
Scénarios typiques d'études de systèmes CCHT en simulation RTS
Chacun doit savoir qu'il n'existe pas un RTSM universel pour répondre à tous les types d'études opérationnelles CCHT. Les RTSM adaptés doivent être choisis pour répondre aux exigences particulières aux différents contextes d'étude. La BT présente quelques scénarios typiques d'études CCHT, dans lesquels l'utilisation de la simulation RTS est efficace.
La conception et l'ingénierie du développement des fonctions C&P sont des parties intégrantes de la conception du logiciel du système C&P global. Le résultat du processus commun de développement des études et du logiciel est le système de contrôle et de protection de l'installation. Ce logiciel est ensuite évalué, validé et, en fonction du processus de développement global, optimisé avec les armoires des équipements de contrôle. Dans la phase de développement hors site, on démontre au moyen de la simulation RTS que le système de contrôle et de protection réel fonctionne conformément aux spécifications techniques.
Les études du fonctionnement post-incident des projets CCHT, et des corrections à apporter, ont pour but d'analyser et d'identifier toute erreur de la logique C&P ou tout mauvais réglage qui provoquent un mauvais fonctionnement, un déclenchement ou une performance non satisfaisante de la liaison CCHT. Dans les études tous les événements d'exploitation seront simulés sur une plateforme constituée du simulateur temps réel et de la réplique du système C&P CCHT. Les modifications du système C&P CCHT qui sont proposées peuvent être vérifiées, et intégrées pour améliorer le comportement à la suite d'un événement de même nature. Ces simulations prennent place tout au long de la vie opérationnelle d'un projet, et ont pour objet d'éviter des anomalies de protection et de contrôle CCHT, ainsi que des fonctionnements incorrects ou défaillants lors de la survenue de défauts ou de perturbations.
Le réseau CA connecté fournit la tension de commutation des convertisseurs LCC CCHT pour permettre la conversion CA – CC – CA et réaliser le transfert de l'électricité. Il peut exister certains problèmes d'interaction entre les systèmes CCHT et les réseaux CA voisins, aussi bien pour les réseaux injectant, et pour les réseaux recevant, l'énergie CA. Connecter un système CCHT à différents équipements CA, dans des conditions de réseau variables, est un problème spécial et complexe. Le contrôle dynamique de dispositifs à électronique de puissance tels les systèmes CCHT, les SVC et les STATCOM, peut via le réseau CA interagir d'une manière qui ne peut être anticipée. En outre certaines fonctions des systèmes C&P CCHT, comme le Limiteur d'Ordre de Courant Dépendant de la Tension (VDCOL), ou un contrôle coordonné qui a été conçu pour coordonner le fonctionnement CCHT et celui d'équipements proches tels que des SVC/STACOM, dépendent des conditions du réseau CA connecté. Une étude de l'interaction avec le réseau CA peuvent être une démarche prudente pour assurer la stabilité du système CCHT.
Les transports d'électricité à longue distance ont pour rôle important d'alimenter des consommations, et les stations de conversions sont généralement implantées dans, ou près, des grands centres de consommations L'augmentation des consommations d'électricité, tout particulièrement dans les pays en développement comme la Chine, le Brésil ou l'Inde, a conduit à des configurations dans lesquelles de multiples liaisons CCHT se retrouvent en forte proximité électrique. Bien comprendre comment l'étude de tels systèmes doit évoluer par rapport à celle d'une injection CCHT unique, comme par exemple pour l'analyse des défaillances de commutation multi-CCHT, est nécessaire.
Modélisation des équipements CCHT pour la simulation temps réel
Les simulations temps réel sont basées sur la théorie des transitoires électromagnétiques (EMT). Comme la théorie EMT et les algorithmes sont bien documentés dans de nombreuses publications classiques, on se concentre sur les techniques spécifiques utilisées dans la modélisation des équipements et des systèmes CCHT, pour les simulations temps réel.
Il existe deux approches différentes dans la représentation des groupes de valves des Convertisseurs Commutés par la Ligne (LCC). Une approche consiste à adopter la même méthode que pour le traitement des machines synchrones ou des transformateurs, et à modéliser le groupe de valves comme un modèle spécifique dans le logiciel de simulation. L'autre approche consiste à représenter le groupe de valves comme un ensemble de branches individuelles. Ces branches sont ensuite intégrées comme une partie des équations du système entier. Ces deux approches ont été suivies dans les simulateurs temps réel de recherche et dans ceux du commerce.
Un modèle de Convertisseur Multiniveau Modulaire (MMC), demande une puissance de calcul très importante pour des nombres élevés de sous-modules, qu'on ne peut obtenir qu'avec des FPGA. La solution de substitution constituée de réseaux et d'autres méthodes d'équivalents de réseaux, rend plus facile une simulation temps réel efficace des valves MMC quand il y a un grand nombre de sous-modules (SM) à la fois sur les processeurs et les FPGA. Le plus récent développement est le modèle générique MMC sur PGFA. Ce modèle générique est capable de modéliser tous les combinaisons d'allumage des IGBT d'un sous-module MMC. Par conséquent on peut étudier une grande variété de défauts internes de MMC. En même temps il est capable de modéliser les différents paramètres d'un sous-module donné, ainsi que les défauts entre bras et entre bras et terre.
Le modèle du transformateur de conversion, et en particulier pour le système LCC, est combiné avec celui du groupe de valves, pour deux raisons, d'une part pour économiser des capacités de calcul, et d'autre part, pour fournir la mesure gamma aux contrôleurs qui en ont besoin. Dans la plupart des théories EMT traditionnelles, la saturation du transformateur est mise en œuvre soit par une inductance variable, soit par une injection raccordée à chaque borne d'un transformateur. Il est habituellement admis que la solution d'une admittance variable est numériquement plus stable que la méthode de l'injection. Récemment la demande de modélisation de la composante continue dans le transformateur a conduit à un algorithme plus sophistiqué de modélisation de transformateur. Les algorithmes basés sur la solution des circuits magnétiques présentent des avantages pour une modélisation de plus haute précision de ce type de phénomène. Un des modèles les plus populaires, dénommé Circuit Magnétique Equivalent Unifié (UMEC) est disponible sur certains simulateurs temps réel numériques.
La précision de la modélisation des lignes de transport est un maillon très important de l'essai en boucle fermée des systèmes CCHT. Le modèle de ligne de transport tenant compte de la fréquence le plus couramment utilisé est le modèle de J. Marti, basé sur le concept du domaine modal. On fait l'hypothèse que la matrice de transformation est constante, ce qui signifie que l'on emploie des matrices de transformation phase-mode et mode-phase identiques pour toutes les fréquences. Dans certains cas, malheureusement, quand des transformations dépendantes de la fréquence ont été utilisées dans les simulations EMT, les simulations ont été numériquement instables. L'utilisation des modèles de ligne de transport phase-domaine dépendant de la fréquence permet d'éviter les problèmes liés aux transformations dépendant de la fréquence.
Modélisation RTS des systèmes C&P CCHT
En règle générale la simulation RTS des systèmes C&P CCHT implique trois méthodes de modélisation, comme montré sur la Figure 1.
Les répliques physiques des systèmes C&P d'un système CCHT sont connectées au moyen d'une interface physique sous la forme d'une boucle fermée (Méthodologie 1). En variante, un modèle de système CCHT basé sur un PC (Méthodologie 2) ou un modèle logiciel de système C&P (Méthodologie 3) peuvent aussi être utilisés dans un simulateur temps réel. Il est important de souligner qu'un travail de simulation RTS peut être réalisé avec uniquement des copies, avec uniquement des simulateurs PC, avec uniquement des modèles logiciels, ou avec une combinaison des 3 méthodologies. L'approche optimale va dépendre de nombreux facteurs, parmi lesquels les objectifs de l'essai ou de l'étude, la complexité des systèmes, la disponibilité du matériel de simulation RTS, le travail de constitution du simulateur et le coût impliqué.
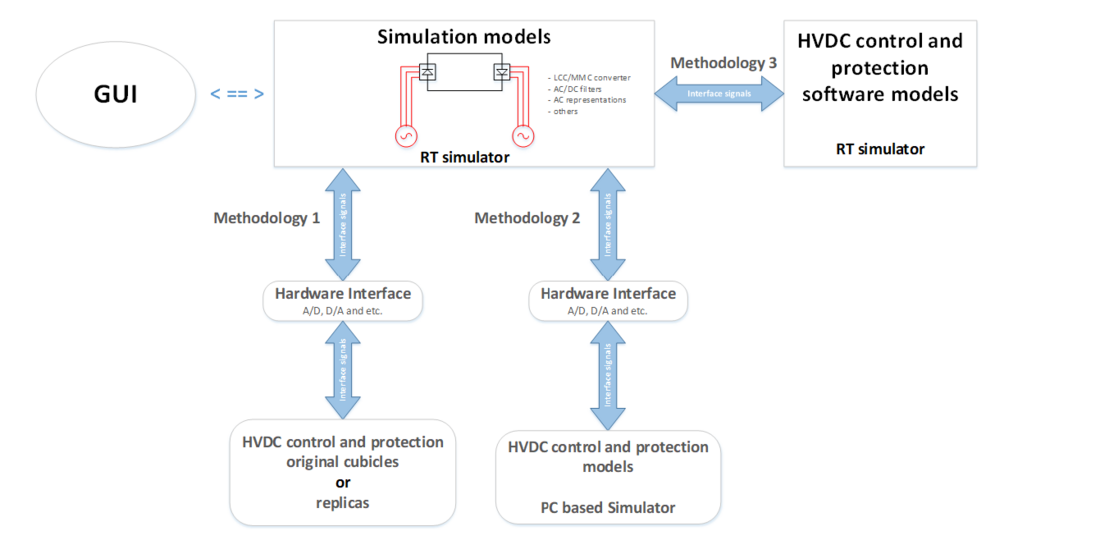
Figure 1 - Concept d'environnement RTS pour les études des systèmes CCHT
Modélisation des Systèmes CA pour la simulation temps réel
Dans les simulations CCHT, il n'est pas faisable en pratique, et pas nécessaire, de modéliser la totalité des systèmes CA connectés, et deux types de représentation des systèmes CA sont habituellement pratiquées, d'une part le Modèle statique Simplifié de Source de Tension, et d'autre part, un Modèle dynamique Equivalent.
Les modèles statiques simplifiés de source de tension sont utilisés pour simuler le bus infini derrière l'impédance du système. Ils représentent essentiellement l'impédance de court-circuit et ne simulent pas le comportement dynamique du réseau CA, tels que les transitoires électromécaniques des machines.
Le modèle dynamique équivalent est généralement obtenu à partir des modèles du système CA complet fournis par un logiciel de stabilité transitoire (RMS). Différents calculs de répartition sont normalement pris en compte pour obtenir les représentations équivalentes. Dans le modèle dynamique équivalent, le niveau de détail des descriptions du réseau et des limites dépend des finalités de l'étude. Une des caractéristiques clés du modèle dynamique équivalent est de capturer la dynamique électromécanique des machines, et il doit conduire à un comportement du réseau semblable à celui des modèles du réseau complet pour les aspects suivants :
- La répartition des charges et des productions des principales sources de production, lignes de transport et/ou lignes d'interconnexion
- Les niveaux de court-circuit sur les bus critiques, dont les bus des convertisseurs
- Les profils de l'impédance harmonique sur les bus des convertisseurs
- La réponse en tension aux petites et aux fortes perturbations
- La stabilité angulaire et les conditions d'amortissement du réseau
Méthodologie de Validation et d'essai des Modèles
Le but de la validation des modèles est de définir un modèle, et de choisir ses paramètres, pour qu'il représente le comportement dynamique des dispositifs installés qui sont modélisés d'une manière appropriée pour les études de système électrique. L'affirmation laisse toutefois des marges importantes d'interprétation, quiant à la signification effective de "appropriée" et de "études de système électrique". Ainsi il apparaît que le but principal est en premier lieu de mieux définir ces termes, et ensuite de présenter un aperçu des méthodes possibles d'obtention de la validation do modèle et du niveau auquel le modèle est considéré comme valide pour le système CCHT. Une vue d'ensemble des différents démarches de validation est donnée dans la figure 2.
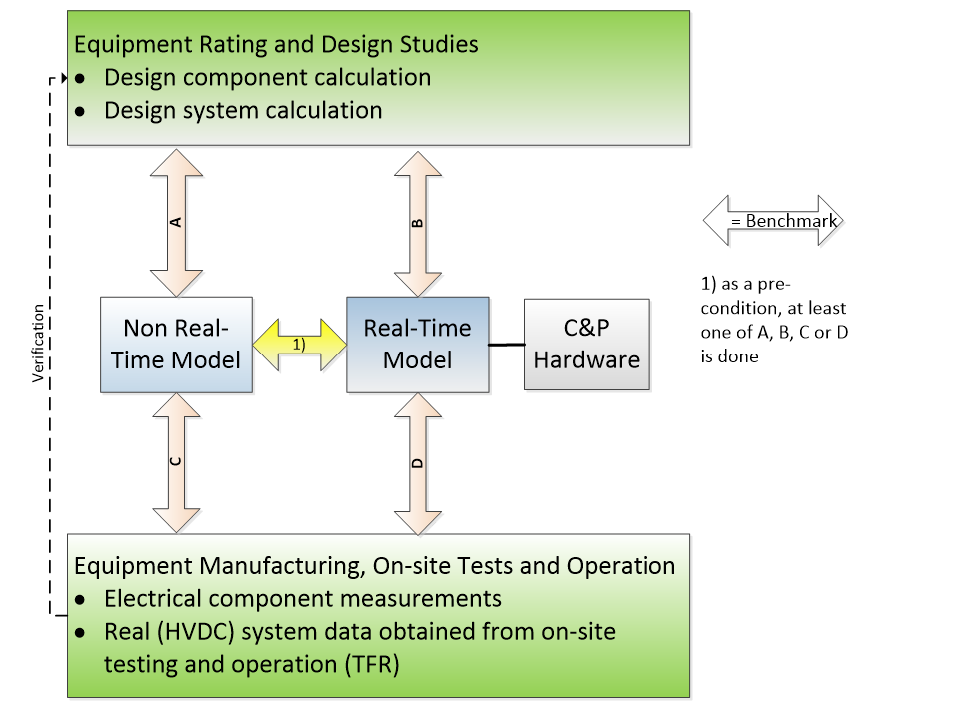
Figure 2 – Vue d'ensemble des démarches de validation
Conclusion
La BT donne des directives de modélisation RTS pour des scénarios typiques d'études CCHT, couvrant tous les aspects d'un environnement de simulation. Les techniques détaillées de modélisation sont exposées dans la BT, avec plusieurs modèles plus ou moins précis, pour un dispositif ou un système C&P, ainsi qu'avec des directives pour choisir les modèles en fonction des différents objectifs d'étude. Une bibliographie importante et quelques exemples d'études approfondies portant sur des projets CCHT de par le monde figurent également, et référence des publications pertinentes et importantes sur le sujet, et donne des informations pratiques et des références sur l'application des simulations RTS dans une variété d'études.
Other Technical Brochures




