Problèmes de protection et d'automatismes relatifs aux réseaux séparés, pendant la reconstitution / le redémarrage autonome d'un système électrique
On constate une augmentation des coupures de réseau, due au nombre croissant des désastres naturels, à l'inter-connectivité accrue des réseaux, aux évolutions des mix des charges et des productions. Après une coupure de grande envergure, une reconstitution rapide du réseau devient de plus en plus nécessaire que le monde va vers un usage croissant de l'énergie électrique dans les processus, la fourniture de chaleur et le transport, pour répondre aux objectifs des systèmes énergétiques bas carbone. Sur la base des analyses post-mortem des coupures, il a été observé que la reprise du service était retardée par les fonctionnements des équipements de protection, qui dans certaines situations se comportent de façon non prévue au cours de la reconstitution. Ces actions intempestives des protections peuvent induire des retards de coordination qui conduisent in fine à suivre des plans de reprise de service différents, et plus longs (qui ne font pas partie des nombreuses options de réalimentation de l'ossature du réseau), constatés à la suite de coupures de grande envergure.
Chef de file
(NZ)
N. NAIR
Secrétaire
(NZ)
R. SHAW
Secrétaire
(NZ)
D. KANIARU
A. OOMMEN (ZA), D. KAMENSCHIKOW (DE), M. LIZER (PL), F. COFFELE (UK), M. ENNIS (US), A. BARTYLAK (ZA), B. SHI (CN), C. BOOTH (UK), G. LLOYD (UK), M. FAZLALI (SE), J. MARQUES DE LIMA (BR), H. LAAKSONEN (FI), T. FOXCROFT (AU), G. HURFORD (ZA), I. TSHWAGONG (ZA), L. NAIDOO (ZA), B. CHRISTISON (ZA), S. JOSEPH (ZA), A. HARJULA (FI)
Le présent article constitue un résumé, à haut niveau, des travaux du GT B5.54 dont l'objectif était d'étudier les problèmes de protection et d'automatismes (P & A) qui peuvent retarder la mise en œuvre des procédures de reprise de service du réseau. La Figure 1 montre le déroulement de la reconstitution, entre la survenance de la coupure et le moment où une situation normale est retrouvée.
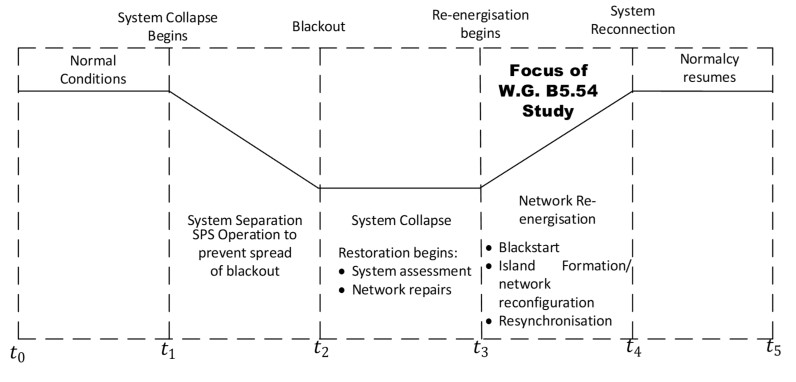
Figure 1 – La période prise en considération
Le Groupe de Travail (GT) s'intéresse tout particulièrement à la phase de réalimentation du réseau, et les membres du GT ont pris en compte les Brochures Techniques CIGRE antérieures, parmi lesquelles:
- GT 38.06.04: Utilisation des systèmes experts pour la reprise de service des réseaux électriques - BT 090
- GT 34.08: Politiques de séparation des réseaux et de reprise de service pour la prévention des effondrements des réseaux électriques - BT 200)
- GT 39.01: Les besoins et l'environnement des opérateurs de conduite du réseau en situation de reconstitution du réseau. Questionnaire de benchmark et enquête - BT 208
- GT B5.01: Ré-enclenchement automatique et reconstitution locale du réseau (CE B5 a repris l'activité de CE C4) - BT 270
- GT C2.23: Procédures et pratiques de reconstitution du réseau - BT 712
La plupart de ces travaux précédents avaient abordé la reconstitution du réseau essentiellement d'un point de vue stratégique en examinant les politiques et les procédures de reconstitution, seul le GT B5.01 s'était intéressé à la question du ré-enclenchement automatique, mais du point de vue du réseau de distribution. Ceci a fait que la plupart des compagnies de transport et de distribution ont développé des plans et des séquences de reprise après coupure générale. Cependant des incidents de grande envergure récents ont mis en évidence des délais dans les procédures de reconstitution, dus à des fonctionnements intempestifs de protection au cours de la réalimentation du réseau :
- Coupure USA/Canada 2003 : Difficultés de resynchronisation dues aux écarts de tension
- Coupure Italie/Suisse 2003 :
- Perte des communications et des informations de réseau (SCADA) et perte de la visibilité du réseau
- Difficultés de resynchronisation au moment de la reconnexion de deux réseaux séparés faibles, présentant des écarts de phase importants
- Coupure Brésil/Paraguay 2009 : Difficultés de resynchronisation d'unités de production prêtes à participer à la reprise de la charge
- Coupure en Inde 2012 : Fonctionnement de protection d'un générateur qui essayait de maintenir un réseau séparé
- Coupure Turquie/Bulgarie 2015 : Fonctionnement intempestif d'un système de protection spécial déconnectant les lignes d'interconnexion entre la Bulgarie et la Turquie
- Coupure Australie 2016 : Fonctionnement de protection de transformateur sur le courant d'appel
Pour ces incidents il faut évaluer et comprendre les problèmes constatés lors de la réalimentation du réseau, et en premier lieu du point de vue du fonctionnement des protections et des automatismes.
Description de la Brochure Technique
Dans la Brochure Technique (BT) sont intégrés trois faisceaux de contributions, le corps du savoir technique, les expériences des membres du Groupe de Travail et l'exploitation des contributions techniques issues de l'enquête, et un Rapport Spécial de la Conférence CIGRE. 80% de la BT vient des contributions des membres, 10% sont constitués par le résumé des réponses à l'enquête lancée pour examiner les problèmes spécifiques de P & A rencontrés pendant la reconstitution. Les 10% restants sont un synthèse des contributions pertinentes qui ont été recueillies lors de la discussion du sujet préférentiel PS1 du B5 à la Conférence 2018, dont le sujet était "les protections dans les situations d'urgence du réseau", pour lequel le Chef de file du GT B5.54 était le Rapporteur Spécial. Toutes ces contributions ont abouti à la préparation des sept chapitres de la BT. Les chapitres 1 et 2 présentent respectivement les travaux entrepris précédemment sur le sujet, et les études de cas à partir desquelles le domaine d'activité du Groupe de Travail a été établi. Ceci a déjà été exposé dans les lignes précédentes, et on ne discute dans la suite que des points exposés dans les chapitres 3 à 6.
Pratiques de reconstitution de réseau
On peut suivre différentes stratégies pour réalimenter le réseau après une coupure de grande envergure, en fonction de la nature et du déroulement de la coupure. Pour la majorité des compagnies d'électricité la stratégie la plus courante de remise sous tension du réseau consiste à démarrer d'abord le générateur à démarrage autonome prédéfini, à constituer des réseaux séparés centrés sur les générateurs à démarrage autonome et à synchroniser les réseaux séparés, comme montré sur la Figure 2.
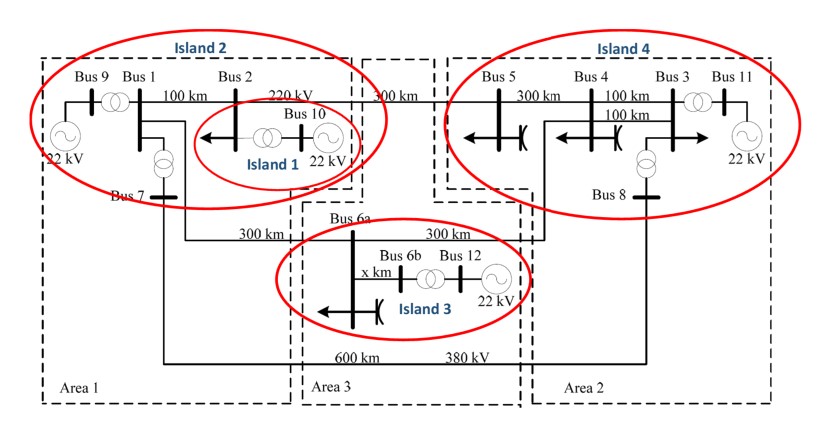
Figure 2 - Exemple de processus de création de réseau séparé utilisant le modèle du benchmark de transport CIGRE
Si cette stratégie ne réussit pas, on utilise des liaisons régionales d'interconnexion à des réseaux déjà rétablis, ou à des réseaux non affectés par la coupure, pour réalimenter le réseau. Ceci s'est passé ainsi dans la plupart des études de cas citées auparavant.
En ce qui concerne les générateurs à démarrage autonome, sans appel à des sources d'énergie externes, les centrales hydrauliques ont besoin de moins de 1% de puissance auxiliaire, et sont donc les générateurs qui sont préférentiellement choisis pour le démarrage autonome, plutôt que les centrales thermiques qui ont besoin d'une puissance égale à 10% de leur capacité pour démarrer. Cependant des centrales thermiques, si elles ont équipées de moyens de délestage des charges internes, peuvent être utilisées pour un démarrage autonome, à condition qu'on puisse les faire fonctionner à une charge minimale aussi rapidement que possible, les grandes centrales à charbon fonctionnant de façon stable et en sécurité à 50% de leur charge nominale. La plupart de ces unités de production ont besoin de brûleurs fuel de soutien pour stabiliser les chaudières en cas de charges inférieures à 50%, et c'est dans cette situation que l'unité de production peut devenir instable. Il faut donc impérativement charger l'unité à un niveau tel qu'elle n'ait plus besoin du soutien des brûleurs fuel. Avant la remise sous tension du poste ou du réseau, les postes doivent être préparés et configurés. Après une coupure tous les disjoncteurs d'un poste seront restés fermés, et il est important de noter que la préparation d'un poste avant la remise sous tension initiale est une des actions les plus cruciales de la reprise. Avant de décider du choix du poste qui est à remettre sous tension, il faut prendre en compte les points suivants:
- La durée de l'absence d'alimentation CA ;
- L'état de l'alimentation CC du poste ;
- Les risques associés à la première mise sous tension ;
- Les tensions en extrémité de la ligne connectée au poste provoquées par l'effet Ferranti ;
- L'existence de moyens suffisants d'absorption de puissance réactive pour garantir que les générateurs ne vont pas dépasser leurs limites de sous-excitation ou de surexcitation quand une ligne ou un poste seront mis sous tension.
Les équipements auxiliaires des postes, qui sont des équipements CC, doivent être disponibles même en l'absence de puissance transmise. Dans tous les réseaux il existe des générateurs CC de secours stockés en un point central. Ces générateurs peuvent être utilisés dans les sites qui rencontrent des problèmes CC lors de la reprise. Un plan de conservation de l'énergie CC doit s'appliquer pour économiser l'énergie disponible pendant la reprise; il doit analyser toutes les charges CC du poste et examiner ce qui peut être fait pour prolonger la vie des batteries en l'absence de ressource CA. La durée de disponibilité typique des batteries des postes de transport est d'environ 8 à 12 heures, en fonction de leur âge. Il est par conséquent vital de s'assurer que des instructions sont transmises à tous les postes immédiatement, concernant le plan de conservation CC à appliquer. Il faut aussi souligner que si l'alimentation CC est coupée il n'existe plus de service SCADA ou de communication vocale avec le poste. Ceci aura un impact parce qu'au moment où le poste sera prêt à être remis sous tension, il faudra avoir prévenu au préalable les agents pour que du personnel de terrain soit présent sur site pour rétablir l'alimentation CC.
Quand on reprend la charge il faut prendre en compte de nombreux facteurs. Il est recommandé qu'au stade initial de la reconstitution du réseau on procède par petits blocs de charge. Une fois que les grandes unités de production commencent à être synchronisées les tailles des blocs de charge peuvent être augmentées. Avant d'en être à ce point l'opérateur du centre de conduite doit être informé du type de la charge qui doit être reconnectée. Les charges sont de ce point de vue de trois types principaux, résidentiel, commercial et petite industrie, et industrielle. Chaque type de charge a ses caractéristiques propres, et lors de la reprise il faut réaliser un mix entre les différents types de charge. Par exemple les charges résidentielles seront toujours connectées après l'incident (mais il peut avoir des problèmes de connexion de charges nouvelles), alors que les charges industrielles ne réapparaitront qu'après un délai significatif, dû au temps de reprise des processus (qui peut être de 8 heures), sans problème de connexion de charges nouvelles.
Contrôle de tension et de fréquence
Pendant la reconstitution du réseau le contrôle de la tension est beaucoup plus compliqué qu'en régime établi d'un réseau en état normal. Dans un réseau en état normal le courant de défaut est élevé au niveau des postes proches des centrales et dans ces centrales, et il diminue quand on s'éloigne des centrales. Le niveau du défaut d'un réseau est fonction du nombre des centrales raccordées au réseau, et durant les phases initiales de la reconstitution les niveaux de défauts sont minimaux, du fait du nombre limité des générateurs alors connectés au réseau. Le niveau de défaut croît à chaque fois qu'un générateur se synchronise au réseau séparé. Quand le niveau de défaut est faible un petit changement de la puissance réactive transmise (MVar) se traduit par une grande variation de tension. Des dispositifs tels que les réactances, les condensateurs et des compensateurs statiques de puissance réactive (SVC) se comporteront de façon différente pendant la reconstitution du fait des niveaux de défaut plus faibles.
Le contrôle de la fréquence est également plus compliqué pendant la reconstitution. Dans un système électrique en état normal l'écart de fréquence est fonction du volume de production raccordé et des volumes de réserve de production disponibles dans ces unités. Dans un système électrique constitué d'une seule unité de production, la puissance de réglage sera beaucoup plus faible. Sa valeur effective dépend du nombre des unités de production en ligne et des réserves de production du réseau séparé. Le contrôle automatique de la production (AGC) n'est pas non plus disponible pendant la phase de reconstitution. Il est toujours de bonne pratique de fonctionner à une fréquence légèrement supérieure quand on reprend des charges, mais il faut toujours la garder dans certaines limites. La raison de cette pratique tient au fait que la fréquence va baisser au moment de la connexion de la charge supplémentaire. Par contre quand on va resynchroniser des unités de production supplémentaires au réseau séparé il est préconisé de ramener la fréquence en dessous de la fréquence nominale avant la synchronisation. On peut ainsi éviter une excursion de fréquence excessive si le générateur synchronisé fonctionne à charge élevée.
En ce qui concerne les modes de contrôle des générateurs, les opérateurs de système doivent comprendre les différents modes de contrôle des générateurs de leur système électrique, les centrales de production pouvant fonctionner avec différents modes de contrôle de tension et de fréquence. Le contrôle de la vitesse des générateurs, tout spécialement au début du processus de reconstitution, doit être capable de répondre à des échelons de charge. La vitesse de réponse du régulateur de vitesse est habituellement configurée de façon à répondre très rapidement aux changements de charges ou du réseau. Mais en situation de reprise ou de réseau séparé, l'inertie est beaucoup plus faible, et la réponse du régulateur de vitesse peut provoquer des instabilités. Il est suggéré de réduire la vitesse de réponse du régulateur pour éviter des instabilités de vitesse avec des oscillations croissantes de la vitesse. Pour réduire les courants d'appel, l'excitatrice des unités à démarrage autonome doivent être capable faire croître lentement la tension du générateur en cas de mise sous tension de lignes ou de transformateurs. En outre la valeur de la tension au début de la mise sous tension doit être la plus basse possible. A la fin du processus d'augmentation de la tension du générateur il est recommandé de mettre en service le contrôle automatique de tension (AVR) en mode contrôle de tension. Ceci est important pour prévenir des écarts de tension lors de la réalimentation des charges ou des lignes, et également lors du démarrage des moteurs dans les autres centrales électriques. Des réactances shunt peuvent être utilisées pour compenser la capacité des lignes et prévenir la sous-excitation des générateurs à démarrage autonome. Dans certains cas les générateurs hydrauliques doivent utiliser une excitatrice pilote pour atteindre une certaine tension, avant de basculer sur l'excitatrice normale. Lors du démarrage autonome il faut tenir compte de la courbe de production de puissance réactive du générateur en régime d'excitatrice pilote.
Simulations et essais
Les procédures de redémarrage autonome doivent être vérifiées rigoureusement par le biais de simulations pour s'assurer que la procédure est faisable, sûre, et n'induit pas de risques cachés. Les simulations fournissent des informations d'une grande valeur sur le comportement du système électrique dans les conditions normales comme dans des conditions extrêmes, et permettent d'analyser des phénomènes intéressants qui sont susceptibles de freiner la reconstitution du système. Les simulations permettent de mieux comprendre tous les risques potentiels et de procéder à des ajustements des procédures, le cas échéant. Trois formes courantes de simulation sont pratiquées :
- Les études de répartition et de courants de défaut
- Les simulations dynamiques destinées aux études de stabilité transitoire et de comportement sur creux de tension
- Les simulations des Transitoires Electromagnétiques (EMT) destinées aux études de coordination de l'isolement et des Résonances Sub-synchrones (SSR)
Les simulations des régimes permanents sont utilisées pour vérifier l'équilibre production-consommation des réseaux séparés constitués. Les simulations dynamiques, par ailleurs, sont utilisées pour les études de défaut et pour vérifier la stabilité des réseaux séparés constitués. Les études EMT permettent d'analyser les surtensions, la ferrorésonance, les tensions transitoires de rétablissement, et le fonctionnement détaillé des protections. Pour garantir une haute qualité de l'analyse dynamique il faut posséder des modèles précis des composants du système qui vont participer aux phases initiales de la reconstitution. Pour analyser le redémarrage autonome le modèle du système ne requiert que les quelques éléments du réseau qui jouent un rôle dans la reconstitution du système et le modèle n'est donc pas volumineux, mais appelle un haut niveau de précision pour être capable de restituer tous les phénomènes qui doivent être analysés.
Les simulations dans le domaine temps doivent suivre pas à pas la procédure de reprise, dont l'occurrence de courts-circuits à chaque étape de la reprise, pour analyser les transitoires de manœuvre et le fonctionnement des protections. Les simulations EMT sont nécessaires pour les étapes au moins jusqu'au point où la première unité commerciale de grande taille est synchronisée au réseau qui a été constitué à partir du générateur à démarrage autonome, et qu'une charge d'un volume significatif a été alimentée. Le volume de charge qui est nécessaire pour supposer un comportement électromagnétique normal du réseau séparé dépend du niveau de tension du réseau de transport et de la taille des unités de production et des transformateurs du réseau. Par exemple pour un réseau à 400 kV avec un générateur de 600 MW, constitué à partir d'un moyen de démarrage autonome, et des transformateurs en réseau de 500 MVA, une charge de 100 MW peut être considérée comme suffisante pour supposer que le comportement électromagnétique du réseau ne sera pas anormal. Pour un autre exemple, avec un réseau à 132 kV, avec des générateurs de 60 MW et des transformateurs de 50 MVA, une charge de 10 MW peut être considérée comme suffisante. En règle générale le niveau requis de charge (résistance) du réseau séparé doit être suffisant pour assurer un amortissement approprié des transitoires de manœuvre et de la ferrorésonance.
Les essais périodiques des moyens de redémarrage autonome sont exécutés en conformité avec les exigences du Code de Réseau local, ou de toute autre exigence réglementaire applicable au titre de la réglementation de l'électricité. Du fait de la complexité des essais de redémarrage autonome en situation réelle et des coûts impliqués, il est habituel de séparer les essais nécessaires en essais partiels et essais complets. Les essais partiels impliquent un redémarrage de l'unité de production à partir d'une source indépendante et la remise sous tension d'une partie définie du système de transport ou de distribution, alors que l'essai complet va jusqu'à la montée en charge de l'unité de production pour démontrer la possibilité du démarrage autonome. Pour l'essai complet il vaut mieux habituellement choisir un seul client, représentant une charge suffisante et bien définie, pour alléger les besoins de coordination et de communication. Une fois que client a accepté de participer à l'essai de redémarrage autonome, tous les risques encourus par le client doivent être identifiés et discutés.
Protections et automatismes du générateur
Les principaux problèmes qui ont été identifiés en relation avec la protection du générateur se rapportent aux variations de puissance et aux tensions anormales qui peuvent apparaître pendant la reconstitution. Les tensions anormales viennent de la mise sous tension de lignes de transport longues et à vide, alors que les excursions de puissance se produisent dans un système multi-machines à la suite de déséquilibres entre la puissance mécanique des machines synchronisées et leur charge active. Un tel déséquilibre peut apparaître en cas d'occurrence d'un court-circuit pendant la reconstitution du réseau, au moment de sa réalimentation. Ce phénomène peut impacter le fonctionnement des systèmes de protection et d'automatisme des éléments du réseau.
1) Perte de synchronisme / glissement de pôles
La protection contre la perte de synchronisme (désignée par le numéro ANSI 78) détecte les variations asynchrones de puissance du générateur à partir des transitions des trajectoires des impédances dans la caractéristique de détection de la protection, comme montré sur la Figure 3. Habituellement les réglages de la protection 78 sont basés sur la réactance subtransitoire du générateur Xd (désignée par Zb sur la Figure 3), la réactance XT du transformateur élévateur (désignée par Zc sur la Figure 3) et la réactance équivalente du réseau Xeq (désignée par Za sur la Figure 3 (a) et Zd sur la Figure 3 (b)).
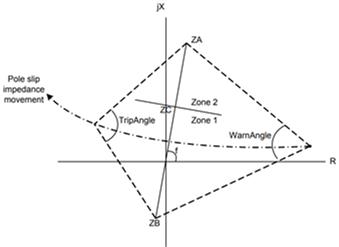

Figure 3 – Caractéristiques typiques, lenticulaire (a) et rectangulaire (b), de la protection contre la perte de synchronisme des générateurs
La caractéristique de la protection est typiquement divisée en deux zones. La zone 1, définie par les vecteurs Za et Zc, détecte les trajectoires d'impédance liées aux oscillations de la puissance transitant via la réactance équivalente des éléments de l'unité de production. Dans un tel cas l'unité est déconnectée du réseau après la première oscillation (quand les trajectoires de l'impédance sortent de la caractéristique de la protection 78, venant de la bordure droite vers la bordure gauche). La zone 2, définie par les vecteurs Za (sur la Figure 3 (a)) ou Zd (sur la Figure 3 (b)), détecte les trajectoires des oscillations de puissance circulant via la réactance équivalente du réseau. Typiquement, dans un tel cas la protection 78 donne un ordre déclenchement après la détection de la deuxième oscillation de puissance. Comme la valeur de Xeq change en fonction de la configuration et des conditions du réseau, on détermine les paramètres Za (sur la Figure 3 (a)) ou Zd (sur la Figure 3 (b)) de la fonction 78 en fonction de la puissance de court-circuit minimale en exploitation (réactance équivalente maximale du réseau en exploitation).
Pendant la reconstitution du système les conditions de court-circuit du réseau peuvent être très basses, et la possibilité d'oscillations de puissance peut être relativement élevée. Dans ces circonstances le fonctionnement correct des algorithmes de blocage des oscillations de puissance est vital dans la mesure où l'absence de blocage peut conduire au déclenchement intempestif des protections de minimum d'impédance et de distance dans le réseau, causant la mise hors service de lignes HT et d'unités de production, et empêchant la reconstitution du système. Mais d'un autre côté les unités de production ne peuvent pas fonctionner hors synchronisme. Pour ces raisons un fonctionnement sélectif et sensible de la protection contre la perte de synchronisme des unités de production est très important lors de la reconstitution du réseau.
2) Protection à minimum de tension
Habituellement le système de protection de l'unité de production comporte une protection à minimum de tension (ANSI 27), qui est destinée à détecter la baisse de la tension de l'unité de production qui est due au déficit de puissance réactive dans le réseau. Ceci peut avoir pour conséquence de provoquer l'arrêt des moteurs des auxiliaires (normalement quand la tension des auxiliaires descend sous 0,8 Un), conduisant à la perte d'efficience de la partie thermomécanique de l'unité de production et à son arrêt complet pour une longue période. C'est la raison d'être de la protection à minimum de tension des générateurs. Elle mesure la tension du côté HT ou MT de l'unité de production, et si la valeur descend sous le seuil défini, elle opère et provoque la mise hors réseau de l'unité de production. Cette action permet de maintenir des conditions de fonctionnement correctes pour les auxiliaires de l'unité de production, et il sera possible de reconnecter rapidement l'unité de production au réseau. Le fonctionnement de la protection à minimum d'impédance de l'unité de production est tout particulièrement important pendant la reconstitution du système électrique.
La plupart des transformateurs d'auxiliaires des groupes sont équipés de changeurs de prises en charge (OLTC) qui permettent d'améliorer les conditions de tension. Le fonctionnement des OLTC suit sa propre dynamique et il faut en tenir compte dans le réglage de la protection à minimum de tension de l'unité de production. La Figure 4 donne à titre d'exemple les évolutions des tensions, du réseau (400 kV), aux bornes du générateur (15 kV) et sur le jeu de barres des auxiliaires de l'unité de production (6 kV), mesurées lors d'études de simulation.
On voit que lors de l'effondrement de la tension du réseau, le régulateur de tension du générateur a été capable de maintenir la tension du stator et la tension des auxiliaires à leurs niveaux nominaux pendant environ 26 s, à compter du début de l'effondrement de tension, puis la tension réseau est descendue à 0,9 Un. Ensuite la limite de la régulation AVR du groupe a été atteinte et la tension aux bornes a commencé à décroître. A ce moment les OLTC des transformateurs des auxiliaires ont commencé à agir pour maintenir une tension des auxiliaires supérieure à celle du générateur. Dans ces conditions la limite nominale de 0,8 Un de la tension des auxiliaires a été atteinte sensiblement plus tard que pour les tensions basses limites du réseau et du générateur.
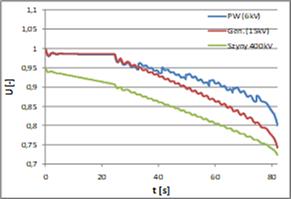
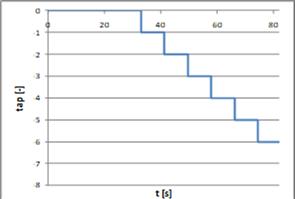
Figure 4 – (a) Niveaux de la tension, réseau (400 kV), bornes du générateur (15 kV) et jeu de barres des auxiliaires (6 kV) et (b) position OLTC, pendant un effondrement de tension
Gardant ceci présent à l'esprit, le réglage du seuil d'actionnement de la protection à minimum de tension 27 d'une unité de production doit être choisi en en fonction de la position du point de mesure de la tension et de la dynamique de l'OLTC. Si la fonction 27 mesure la tension des auxiliaires, on peut la régler à 0,8 Un, avec un temps de fonctionnement typique de 10s. Si la fonction mesure la tension aux bornes du générateur ce seuil devrait être légèrement plus bas, par exemple entre 0,75 et 0,78 Un (0,78 et 0,8 Un si il n'y a pas d'OLTC). Si la tension est mesurée du côté HT du groupe de production, la fonction 27 doit être réglée même plus bas – autour de 0,73 à 0,75 Un (0,76 à 0,78 Un s'il n'y a pas d'OLTC). Ce genre d'approche permet de garder le groupe de production connecté au réseau pendant la durée de l'instabilité de tension, et ceci aussi longtemps que la sécurité d'alimentation des auxiliaires du groupe est assurée, auxiliaires qui sont très importants pendant un redémarrage autonome du réseau après une coupure du système électrique.
3) Protection contre la perte de champ
Il est nécessaire de réexaminer la coordination entre la protection contre la perte de champ (LOF) et le limiteur de sous-excitation (UEL) dans des conditions de tension basse. Le LOF est habituellement réglé en se référant au diagramme R-X alors que le UEL est réglé en se référant au diagramme P-Q, dans les conditions nominales de tension pour les deux. En cas de tension basse il peut y avoir un recouvrement entre les deux, et ainsi entraîner une mauvaise coordination.
Protection et automatismes du réseau de transport
En fonction de l'étape du redémarrage autonome en cours et de la position du défaut, les courants de défaut peuvent varier de quelques centaines d'ampères à quelques milliers d'ampères. La première vérification à réaliser, et la plus importante, est de s'assurer qu'au moins une quelconque des fonctions de protection, principale ou secours, sera capable de détecter les défauts, avant que le courant de défaut ait augmenté suffisamment avec la progression du processus de reprise. Le temps d'élimination du défaut peut être dégradé dans une mesure acceptable, du fait des courants de défauts faibles et de l'impact limité du défaut sur la stabilité du générateur dans ces conditions de faible charge. A chaque étape de la reconstitution du réseau la sûreté du bon fonctionnement des systèmes de protection des réseaux sous tension doit être vérifiée. Des simulations statiques d'un défaut particulier sont par conséquent suffisantes.
1) Protection basée sur l'impédance
L'analyse du bon fonctionnement des relais d'impédance peut être améliorée par la vérification de leur fonctionnement sur défauts résistants. Les essais virtuels, mettant en œuvre des simulations dans le domaine temps et des modèles de protection, sont très utiles pour évaluer leur fonctionnement, car ils représentent correctement les algorithmes complexes des protections d'impédance
2) Protection contre les surtensions
La protection contre les surtensions n'est pas couramment utilisée dans les réseaux de transport, sauf pour la protection des condensateurs shunt. Certaines compagnies utilisent cette protection sur les lignes de transport, avec un seuil de fonctionnement à 120% Un, et un temps de fonctionnement de 1 à 2 s. Comme la remise sous tension est réalisée de manière contrôlée, en démarrant avec des tensions basses d'au moins 0,95 p. u, on peut éviter des fonctionnements intempestifs de protections contre les surtensions. On peut anticiper des surtensions transitoires élevées, mais si des surtensions supérieures à 120 p. u. durent plus de 2 secondes, il peut y avoir là une bonne raison de déclencher la ligne et de rechercher des corrections possibles ou des schémas de reprise différents. Ces situations peuvent refléter un développement d'une ferrorésonance dangereuse, et il est par conséquent préférable de conserver active la protection contre les surtensions, avec des réglages à 120%, et 1 à 2 s, qui conviennent pour les conditions normales comme pour le redémarrage autonome.
3) Protection de la zone des barres
La protection des barres est en général conçue et réglée avec un biais, pour des raisons de sécurité. L'impact du fonctionnement d'une protection de jeu de barres est sérieux tant pour l'intégrité du système électrique que pour les clients, du fait de la perte de nombreux circuits qui peut significativement affaiblir les capacités de transport et conduire à des pertes de fourniture. Les défauts de jeux de barres induisent en général de forts courants de défaut du fait de la contribution de tous les circuits connectés, et en général la sécurité de fonctionnement de la protection de barres n'est pas problématique. Pour garantir une bonne sécurité de la protection de barres et prévenir des fonctionnements intempestifs lors des manœuvres, les réglages de sensibilité appliqués sont supérieurs aux courants des charges maximales. Si on prend en compte les risques supplémentaires, et le temps requis pour le faire, procéder à des modifications des réglages lors d'une coupure complète n'est pas une pratique recommandée. Cependant on peut envisager qu'une compagnie d'électricité procède à une réduction permanentedes réglages de sensibilité à des valeurs inférieures aux courants de charge, quand le retour d'expérience de la sécurité des jeux de barres et les critères d'évaluation des risques le permettent. La probabilité d'un défaut de jeux de barres pendant une reconstitution de réseau est néanmoins plus forte, du fait de l'accroissement des activités opérationnelles dans les postes et de l'augmentation de la sévérité des transitoires de manœuvre. Les défauts de barres peuvent être éliminés de façon fiable par les fonctionnements de zone 2 des protections d'impédance de l'extrémité éloignée des lignes et par les protections de secours des transformateurs, mais avec les temps de fonctionnement associés. Ceci n'a pour conséquence qu'une durée sensiblement plus longue des défauts. Lors de la reconstitution du réseau, les générateurs de la centrale à démarrage autonome ne sont pas chargés et peuvent supporter le creux de tension pendant une durée beaucoup plus longue que dans les conditions normales de fonctionnement. Une fois qu'un groupe plus puissant est synchronisé les courants de défaut sont suffisants pour assurer le fonctionnement fiable de la protection de barres. Pour évaluer correctement les risques liés à durée plus longue du défaut, il faut procéder à des simulations dynamiques à chaque étape de la reprise, pour évaluer la durée prévisible du défaut et la capacité des groupes à supporter la durée accrue des creux de tension dus aux défauts.
4) Protection des transformateurs
Dans les conditions normales les transformateurs sont généralement mis sous tension par le côté à haute tension, mais en situation de reprise, il existe des situations où la mise sous tension se fait par le côté à basse tension, tant pour les transformateurs de transport que pour ceux des groupes. Ceci influe sur les niveaux des courants harmoniques des rangs 2 et 4 qui sont utilisés pour bloquer le fonctionnement de la protection du transformateur pour les courants d'appel, et ces niveaux peuvent devenir trop faibles pour assurer ce blocage sur l'appel de courant. La détermination de ces niveaux peut se faire au moyen d'essais, ou par simulation avec des modèles détaillés des transformateurs.
Les principaux relais de protection des transformateurs de transport (protection différentielle ou différentielle de défaut à la terre) sont réglés de façon très sensible dans une plage de 10 à 20% du ratio du TC. Pour cette raison les faibles niveaux des défauts susceptibles de se produire pendant la reprise n'impactent pas directement la sensibilité de leur fonctionnement. Pour les transformateurs de groupe les réglages peuvent être moins sensibles, entre 400 et 600A, mais toujours en-dessous du niveau des défauts, et ceci garantit le fonctionnement fiable en cas de défaillances internes sévères (près des traversées des transformateurs). Le pourcentage des enroulements couvert par ces protections sera cependant fortement réduit, et en cas de courant faible pour un défaut proche du neutre du transformateur, d'autres dispositifs de protection, tels que les protections Buchholz ou de température d'enroulement, assureront l'élimination. Les protections de surintensité réglées au-dessus de la charge nominale du transformateur n'auront aucune chance de fonctionner jusqu'à la synchronisation d'un plus grand groupe, mais les protections contre les défauts à la terre, réglées plus bas, vont fonctionner, en fonction de la position du défaut. Pour les protections différentielles contre les défauts à la terre les réglages sont normalement calculés pour assurer la sensibilité maximale et il n'y a donc pas de possibilité d'amélioration; les protections devraient fonctionner de façon fiable pendant la reconstitution du réseau.
5) Fonction de ré-enclenchement automatique (ARC)
Les simulations réalisées ont montré que jusqu'au moment où le premier des grands groupes est synchronisé, on peut pratiquer le ré-enclenchement, monophasé et triphasé (choix normal). Les unités opérationnelles de la centrale de redémarrage autonome peuvent supporter le creux de tension d'un ARC non réussi sans perdre leur stabilité. Après la synchronisation du premier grand groupe, il faut par contre désactiver l'ARC triphasé, en général à cause des écarts de phase trop importants auxquels sont exposés les dispositifs de synchronisation des lignes de transport, qui peuvent conduire à des contraintes excessives sur les arbres des générateurs. Un ARC monophasé peut par contre être envisagé, du fait de la probabilité plus forte de survenue de défauts monophasés, du taux élevé de succès des cet ARC, du maintien du synchronisme pendant le temps mort de l'ARC et de l'impact minimal sur les contraintes de torsion de l'arbre. Sans ARC monophasé tout défaut en ligne pendant la reconstitution pourrait conduire à un effondrement du réseau séparé, et à la perte d'un temps précieux. Dans les centrales hydrauliques les ressources en eau sont à prendre en compte dans le redémarrage autonome, et s'il s'agit d'une centrale de pompage, il n'y a en général que quelques séquences de fonctionnement qui sont faisables avant un manque d'eau.
Pour cette raison les ARC qui équipent les lignes participant à la reprise autonome doivent être commutés du fonctionnement monophasé et triphasé vers un fonctionnement monophasé uniquement, et ceci seulement sur les lignes qui acceptent le déclenchement monophasé. Sur les lignes où le déclenchement est seulement triphasé, on doit mettre hors service les ARC, ou on doit modifier les angles de synchronisation et adopter une valeur de sécurité pré-calculée, ou régler à 5 degrés (ce qui correspond aux spécifications de la plupart des machines). Dans beaucoup de compagnies ces modifications de cycle ARC (en/hors service, monophasé/triphasé) peuvent être réalisées à distance sans envoi de personnel sur site. Dans les autres cas les modifications imposent la présence de personnel experts en protection sur site, ce qui peut être difficile en situation de coupure générale. Il ne faut envisager la modification des changements de réglage que sur les protections qui sont parfaitement accessibles à distance.
6) Protection de phase inverse (NPS)
La protection NPS est utilisée pour protéger les générateurs et les moteurs contre des conditions de réseau déséquilibrées qui provoquent la circulation de courants inverses. Les harmoniques d'ordre 5, 11 et 17 sont purement des composantes inverses et il faut surveiller attentivement leur niveau dans le réseau. Par exemple, lors d'un des essais de redémarrage autonome, la protection NPS des moteurs auxiliaires de la centrale dans laquelle un générateur fossile était prêt à être synchronisé, a empêché la réussite du couplage du groupe. La première piste était la possibilité de déséquilibres permanents importants dus à l'absence de transposition des phases sur les lignes de transport courtes. Elle a été rejetée après une vérification soigneuse, enregistreurs de perturbations et simulations à l'appui. Au contraire les tensions sur les jeux de barres de cette centrale particulière ont montré un des déséquilibres permanents les plus faibles. Des investigations complémentaires ont révélé que le niveau des NPS décroissait beaucoup après la mise hors réseau du SVC utilisé pour réguler les tensions pendant les essais. Les analyses des enregistrements des perturbations ont prouvé qu'un niveau très élevé de courants harmoniques circulait dans le réseau séparé, quand le SVC restait en service. L'utilisation de différents dispositifs de contrôle de la tension doit être soigneusement analysée pour éviter que des interactions potentielles créent des instabilités à petits signaux. L'utilisation d'équipements électroniques non correctement filtrés peut aussi créer des problèmes inattendus.
7) Fonctionnement des parafoudres
Les parafoudres sont utilisés pour limiter les surtensions aux bornes des équipements qu'ils protègent. Du fait des caractéristiques non linéaires des circuits magnétiques des transformateurs les courants d'appel sont connus pour atteindre des valeurs élevées et contenir des niveaux importants d'harmoniques. Dans des réseaux séparés les courants d'appels sont limités par la forte impédance de source, mais simultanément la forme d'onde de la tension devient plus distordue, conduisant à la circulation de courants harmoniques élevés dans tous les éléments du réseau séparé. Dans certaines situations ceci peut conduire au développement de ferrorésonances. La capacité d'un réseau séparé à amortir de telles ferrorésonances est critique pour la réussite de la reconstitution. La ferrorésonance peut conduire à des surtensions très élevées qui peuvent se révéler dangereuses pour tous les équipements, mais plus particulièrement pour les parafoudres qui vont se mettre à écouler des courants à fréquence réseau de forte énergie. Le résultat peut être un échauffement excessif des parafoudres et leur défaillance (explosion possible) si leurs capacités thermiques sont dépassées.
La situation la plus favorable au développement de la ferrorésonance est celle où un transformateur est mis sous tension alors que les autres transformateurs du réseau séparé ne sont pas encore chargés. Les surtensions vont faire que les transformateurs déjà connectés vont approcher de la saturation avec des courants magnétisants plus élevés, ce qui va conduire à des échanges d'énergie entre les noyaux des transformateurs du réseau séparé. Le niveau des ferrorésonance (amplitudes des surtensions et des courants) et surtout leur durée, dépendent des capacités d'amortissement du réseau séparé. Le degré d'amortissement est proportionnel à la résistance des circuits. Pour un réseau séparé qui n'a pas encore été chargé le volume de résistance est très faible et donc l'amortissement est minime, ce qui facilite le développement de ferrorésonances destructives qui conduisent à des surtensions de longue durée à fréquence du réseau. Ceci peut mettre en péril les capacités thermiques des parafoudres si les surtensions sont suffisamment fortes.
Resynchronisation du réseau séparé
A une étape plus avancée de la reconstitution du réseau, des réseaux séparés multiples qui ont été constitués à partir de différentes ressources disponibles, vont être prêts pour une resynchronisation, comme montré sur la Figure 5.
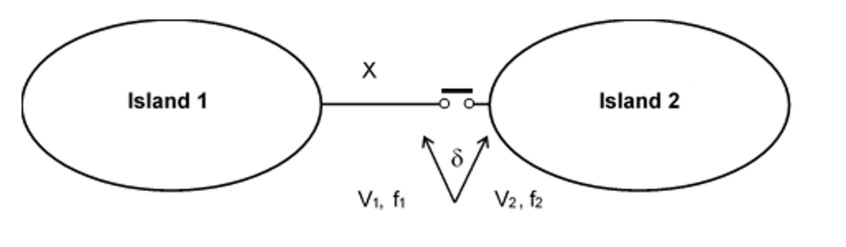
Figure 5. Illustration de deux réseaux réellement séparés
Les deux réseaux sont considérés comme réellement séparés s'il n'existe pas de connexion entre eux et si les réseaux séparés ont atteint un équilibre production-charge durable. Du point de vue de la synchronisation les deux réseaux fonctionnement à leur fréquence propre f1 et f2, qui idéalement devrait être la même et égale à 50 Hz (ou 60). Ceci n'est cependant pas réalisable en pratique et les deux fréquences sont habituellement différentes, avec une fréquence de glissement df = f2 – f1. Les lignes de transport et les couplages de barres sont normalement équipés de synchrocoupleurs ou de moyens de synchronisation. Les transformateurs de transport ne sont pas habituellement équipés de moyens de synchronisation mais, dans les cas où ils le sont, ils peuvent être utilisés pour la synchronisation des réseaux séparés. La connexion de réseaux séparés sans moyens de contrôle de la synchronisation est absolument interdite , dans la mesure où cela peut conduire à des dommages aux arbres des machines, provoqués par des contraintes de torsion excessives.
Sur les équipements de synchronisation les réglages sont normalement calculés ou normalisés pour les conditions normales de fonctionnement du système électrique, pour permettre une utilisation optimale des moyens de transport et une bonne flexibilité du système électrique, tout en maintenant la contrainte sur les machines à un niveau acceptable. Les équipements de synchronisation ne sont conçus pour permettre une synchronisation adéquate de deux réseaux effectivement séparés, et cet inconvénient est renforcé lors de la reconstitution du système par la composition du réseau séparé, avec moins de générateurs à disposition par exemple. Les réseaux de transport sont aussi équipés de moyens de synchronisation de nombreuses technologies différentes, mis en place au cours du temps, avec des différences importantes dans leurs mesures, leurs fonctionnements et leurs précisions. Les équipements les plus modernes sont capables non seulement de contrôle de synchronisme, mais aussi d'une synchronisation totale qui permet une synchronisation très précise de réseaux asynchrones, avec un angle calculé ou prédit très proche de zéro. A chaque fois que c'est possible, les lignes ou les couplages de bus équipés de tels moyens devraient en priorité être utilisés dans le processus de resynchronisation des réseaux séparés.
Les angles de synchronisation aux bornes des groupes doivent être maintenus strictement dans les limites OEM, habituellement 5 à 6 degrés. Les synchronisations en des points éloignés des groupes doivent tenir compte de l'impédance entre le groupe et le point de synchronisation. Cette impédance constitue un coussin amortissant sensiblement les contraintes de torsion et rendant possibles de réglage beaucoup plus large des angles de synchronisation.
Enseignements clés
Pour les membres du Groupe de Travail (11 pays CIGRE et 22 participants), les enseignements clés ou ce qu'il faut retenir peuvent être résumés ainsi :
- La nécessité d'une modélisation précise et détaillée des composants de réseau pour les études de reconstitution du système.
- Le type de simulation et le choix de l'outil de simulation doivent être pris en considération dans les études de démarrage autonome - planification de la remise sois tension.
- La nécessité d'exercice à blancs pour étudier les problèmes de protection en fonction du processus de reconstitution.
- La nécessité d'analyser les différentes fonctions de protection et les schémas spéciaux applicables pendant le redémarrage autonome et la remise sous tension.
- L'importance de l'utilisation des communications, c. à d. les phaseurs (PMU), dans les processus de démarrage autonome/remise sous tension et de resynchronisation.
Travaux futurs
Les problèmes de protection et d'automatismes qui ont été étudiés sont en rapport avec les stratégies traditionnelles, et actuelles, de reconstitution de système. Le système électrique est en train d'évoluer vers un système bas carbone, avec une forte pénétration des productions de nature non conventionnelle, telles que les parcs éoliens, les fermes solaires et les stockages d'énergie. Les systèmes CCHT voient des développements permanents, avec plus de liaisons de transport CC envisagées dans le futur. Il n'y a eu que peu de cas pratiques d'appel à ces nouvelles technologies dans des phases initiales de reconstitution de système, ou parce que le savoir était encore limité ou à cause de l'intermittence de la plupart des ressources renouvelables non hydrauliques. En même que temps le système électrique évolue, il survient de plus en plus de désastres poussant à la recherche de scénarios de résilience plutôt que de fiabilité, qui font que les différents types de systèmes de production devraient être étudiés avec l'objectif d'améliorer leurs capacités de démarrage autonome et de les faire participer activement à la reconstitution du système électrique.
Other Technical Brochures