Applications des robots dans les postes
La gestion traditionnelle du cycle de vie des postes requiert beaucoup de personnel et elle est habituellement pénalisée par des problèmes qui se rapportent à l'efficacité, à la cohérence, à la qualité et à la sécurité des personnes (tout particulièrement dans un environnement haute tension), auxquels peuvent s'ajouter des conditions climatiques sévères et des difficultés d'accès aux sites. Les propriétaires des postes, les gestionnaires des ouvrages et les ingénieurs, sont en permanence à la recherche de solutions pour atteindre des niveaux plus élevés de sécurité, et pour réduire les coûts de construction, d'exploitation et de maintenance des postes. L'utilisation de robots pourrait permettre d'atteindre ces objectifs. Les progrès rapides de l'intelligence artificielle et des technologies des capteurs permettent le développement de robots qui pourraient remplacer ou aider le personnel dans les activités d'exploitation et de gestion des postes. Certains de ces robots sont déjà utilisés dans les postes, avec d'excellents résultats.
Chef de File
(CN)
J. FAN
Secrétaire
(US)
S. SAGARELI
L. LI (CN), T. SUGIMOTO (JP), R. ISHINO (JP), S. MONTAMBAULT (CA), A. RENTON (NZ), J. BEAUDRY (CA), P. PATEL (US), M.M. GONZALEZ (ES), X. JI (CN), R. GUO (CN)
Membres Correspondants: G. MOTA (PT), A. SHAH (US), J.F. ALLAN (CA), Y. LI (AU)

La Brochure Technique (BT) donne une vue d'ensemble des applications existantes des robots dans les postes. Sont également présentés le point actuel et les tendances futures du développement des nouveaux systèmes de robots.
Contenu et méthodologie
Le Groupe de Travail (GT) B3.47 a été lancé en novembre 2016, avec pour objectif de d'acquérir une connaissance approfondie de l'état actuel de la recherche en matière de robots de poste, et de leurs applications, dans le but d'en promouvoir une utilisation effective dans les postes. Les activités suivantes lui ont été allouées :
- Examiner et analyser les conditions de l'application de la robotique dans les postes, au plan mondial ;
- Définir les principaux scénarios de leur utilisation ;
- Identifier les exigences techniques importantes et les problèmes ;
- Procéder à des études de cas en rapport avec les meilleures pratiques ;
- Identifier les besoins de normalisation et formuler des suggestions de suite à ces travaux.
Afin de recueillir un maximum d'informations, un questionnaire a été lancé auprès des compagnies d'électricité, des instituts de recherche et des constructeurs, portant sur les scénarios d'utilisation, les exigences fonctionnelles, les technologies essentielles, les utilisations actuelles et les besoins de normalisation. L'enquête a impliqué 15 pays, et en premier lieu ceux où la recherche sur la robotique dans les postes est la plus avancée.
Description de la BT
Historique du développement de la robotique
Le Chapitre 1 donne une vue d'ensemble de l'historique des développements dans le domaine de la robotique, en général, et dans les postes, en particulier.
Enquête et catégorisation des robots des postes
Dans le Chapitre 2 on présente les réponses au questionnaire. Celui-ci comportait 54 questions, portant essentiellement sur les scénarios d'utilisation, les exigences fonctionnelles, les technologies essentielles, les utilisations actuelles et les besoins de normalisation. L'exploitation statistique des données des réponses a permis de faire le point des utilisations actuelles, de connaitre les fonctions et les technologies mises en œuvre dans les robots de poste existants, les besoins de technologie et les tendances du développement.
Pour faciliter la compréhension de la robotique une définition des robots de poste a été proposée, sur la base des résultats de l'enquête et de l'analyse des systèmes de robots actuellement utilisés dans les postes. Une classification en fonction de différents critères est proposée et permet de montrer les aspects techniques qui différencient les divers types de robots (Figure 1).
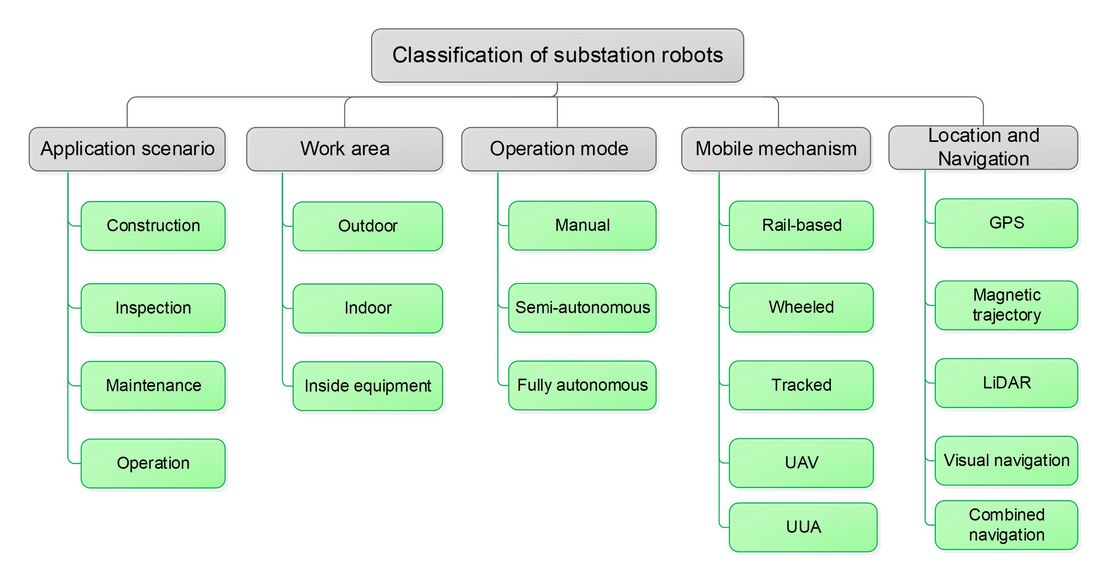
Figure 1 - Classification des robots de poste
Robots de construction des postes
Le Chapitre 3 est consacré à un examen en profondeur des robots de construction des postes, existants et à venir, avec leurs fonctions, leurs technologies, les avantages et les problèmes.
La construction au moyen de robots requiert des données tridimensionnelles précises. La conséquence est qu'après la complétion des travaux de construction les données tridimensionnelles sont un sous-produit disponible. Ces données sont utiles pour la maintenance, la planification et la conception des activités de gestion des installations, et pour la gestion des remplacements d'équipements. Il est donc vital d'être bien informé du développement des méthodes de construction sans personnel faisant appel à des robots.
Les robots exécutent souvent des tâches fastidieuses et simples. Un robot peut par exemple être utilisé pour travailler à un mur en béton, un autre peut être utilisé à courber des fers à béton.
Robots d'inspection des postes
Le Chapitre 4 présente les robots d'inspection et de gardiennage, l'architecture générale des systèmes robotiques, les fonctionnalités exécutées actuellement, ainsi que les principales technologies mises en œuvre dans les robots d'inspection.
Dix années de progrès technologiques ont vu le développement de robots de gardiennage de type UGV (unmannned ground vehicle), et leur déploiement dans des postes extérieurs. Les robots utilisent la localisation GPS et la localisation laser 2D, qui étendent considérablement leurs capacités de navigation. En outre leur domaine d'inspection a été élargi de la surveillance en lumières visible et infra-rouge, à la détection des décharges partielles (DP) basée sur la détection ultrasonique et les tensions à la terre transitoires. Ainsi plus de 1 000 robots de gardiennage ont été mis en service opérationnel dans le monde, à ce jour.
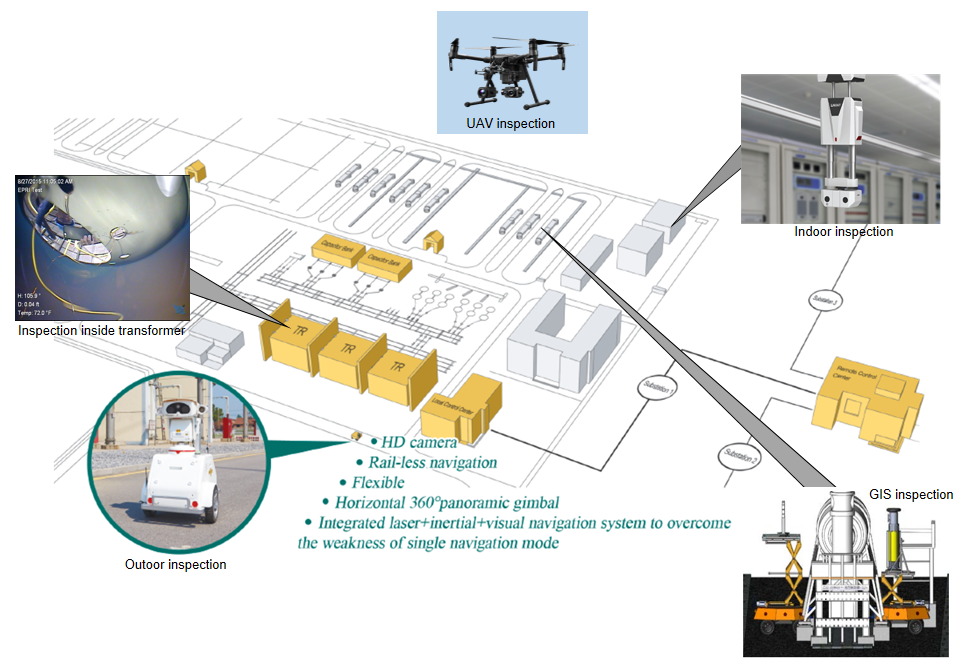
Figure 2 – Vue d'ensemble des robots d'inspection de poste existants
Beaucoup d'autres types de robots d'inspection ont également été mis au point au cours de la dernière décennie, comme des robots d'inspection intérieure montés sur rails, des robots de gardiennage de halls de valves, des robots de détection de DP, et des robots d'inspection interne des transformateurs (voir Figure 2).
Beaucoup de ces robots sont capables de localisation et de navigation autonomes à l'intérieur des postes, ce qui les rend aptes à gardienner ou à inspecter de façon autonome en fonction du besoin.
Robots de maintenance des postes
Dans le Chapitre 5, on débat des robots de maintenance, dont ceux utilisés pour le lavage et le nettoyage sous tension et pour d'autres tâches de maintenance dans les postes. La constitution du système, les fonctions, les performances, les avantages, et les problèmes des robots utilisés pour les travaux sous tension sont discutés.
Un robot de maintenance sous tension a été utilisé pour réaliser le nettoyage des supports isolants, décrocher la glace vive, extraire des objets étrangers, réparer des conducteurs rompus, et pour d'autre activités sous tension.
Robots d'exploitation des postes
On donne dans le Chapitre 6 des informations sur les robots d'exploitation, existants ou à venir, comme les robots d'entreposage des disjoncteurs et ceux qui savent réaliser des manœuvres de commutation dans des postes éloignés, sans personnel. Quelques robots pompiers ont également présentés.
Un prototype de robot d'entreposage de disjoncteur a été testé, et il peut soulever des disjoncteurs de plus de 400 kg dans le bâtiment des appareillages, en étant piloté manuellement depuis la salle de commande. Le robot peut être commandé pour s'aligner automatiquement avec le disjoncteur et pour soulever un disjoncteur depuis le sol. Un robot de gardiennage télé-opéré, muni d'un bras robotisé, a été développé pour inspecter en lumières visible et infrarouge, les équipements d'un poste recouvert de neige, par une température de -30 °C, et pour exécuter des manœuvres de sectionneurs et d'autres équipements de poste, en utilisant un bras mécanique.
Un prototype d'un robot pompier peut fonctionner à des températures très élevées, ainsi que dans des environnements toxiques ou sans oxygène, en présence de fortes fumées, pour remplacer les interventions manuelles. Pour des installations de grande envergure les systèmes de robot pompier sont constitués de robots volants de reconnaissance et de surveillance, de robots de reconnaissance et de surveillance au sol, de robots canons à eau, d'équipement d'extension de tuyau, et de systèmes de commande, le tout étant transporté sur un véhicule. La Figure 3 donne une vue conceptualisée de leur fonctionnement.
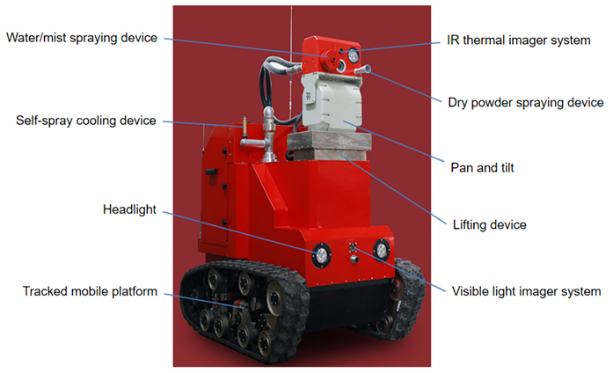
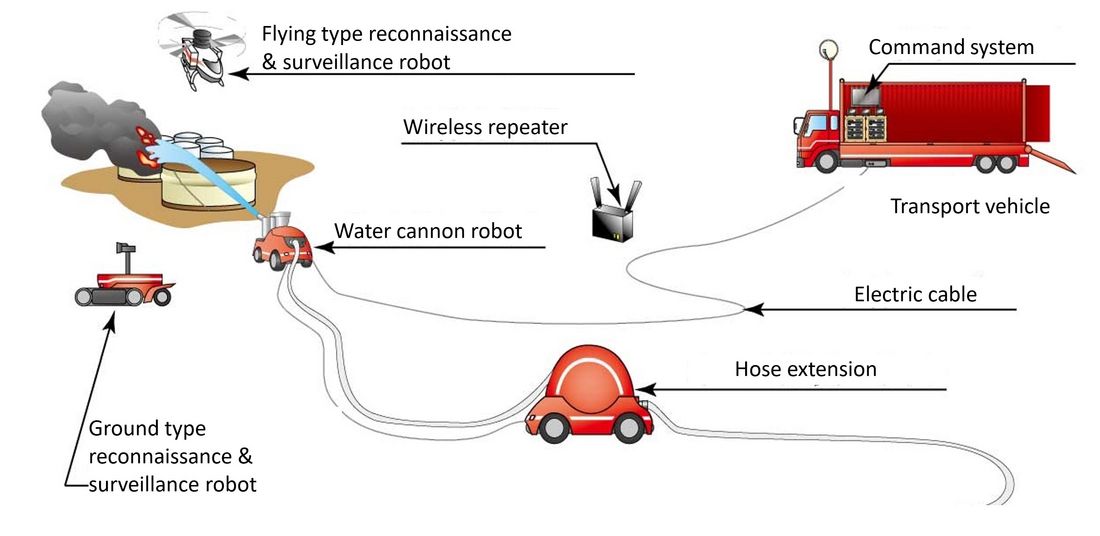
Figure 3 - Systèmes de robot pompier
Gauche : Un prototype de robot pompier / A droite : Un système de robot pompier pour installation de grande envergure
Considérations de normalisation
Dans le Chapitre 7 on peut trouver des références spécifiques aux normes CEI, ISO, IEEE, etc., et à des normes nationales adoptées dans plusieurs pays. Sur la base de ces éléments le cadre d'un système de normes applicables aux robots utilisés dans les postes est proposé, comme montré sur la Figure 4.
Les normes pour robots utilisés dans les postes peuvent intégrer certaines normes générales, en plus de celles qui se rapportent aux robots des différents types. Sur la base du cycle de vie des robots, les normes peuvent être structurées pour inclure des spécifications sur la conception du système, les fonctions et les performances, les essais, la mise en service et l'acceptation, le fonctionnement et la maintenance, mais aussi la mise au rebut et le recyclage. La priorité doit revenir à la normalisation des robots qui mettent en œuvre une technologie éprouvée et avec des besoins d'utilisation clairs, tels que les systèmes de robots de gardiennage pour utilisation extérieure, pour contribuer à élargir à grande échelle l'utilisation de tels robots.
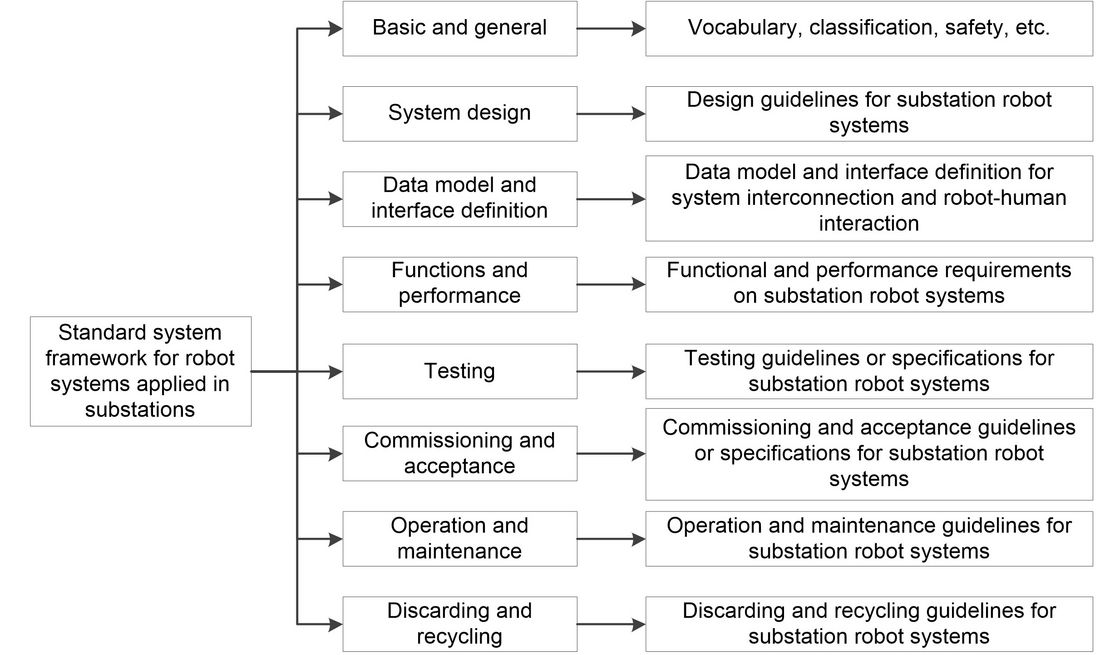
Figure 4 – Cadre d'un système de normalisation des systèmes de robot de poste
Conclusion
Les lecteurs de la BT vont acquérir une compréhension en profondeur de l'état actuel de l'art et des recherches sur les robots de poste et leurs utilisations. Les avantages, les tendances du développement, et des propositions de normalisation sont analysées et présentées.
Les robots de poste actuellement utilisés ou en développement permettent tout un spectre d'utilisations qui couvrent le cycle de vie des postes, depuis la conception et la construction jusqu'à l'inspection, l'exploitation et la maintenance. Dans le domaine de la construction leurs fonctionnalités incluent la réalisation de mesures, le balayage 3D, la conception, la construction, et l'inspection, qui sont les activités qui sont principalement visées par les pays rencontrant des problèmes de personnel, manque ou vieillissement du personnel. Les robots d'inspection ont été mis en service opérationnel dans des tâches de gardiennage et d'inspection des installations, aussi bien à l'intérieur qu'à l'extérieur des postes, mais aussi dans des halls de valves et à l'intérieur de transformateurs. Des robots d'inspection de GIS sont en développement et des systèmes d'inspection basés sur des UAV (unmanned air vehicle) sont en test. Des prototypes de robot réalisant le lavage à l'eau, le décollage de la glace vive, le nettoyage à la brosse, et le remplacement des fusibles défaillants, ont été construits et testés. Des robots d'entreposage autonome des disjoncteurs et de manœuvre des sectionneurs sont conçus pour éliminer le besoin d'un contact direct entre le personnel et les équipements. Des robots pompiers sont mis au point pour réduire les aléas et les pertes causées par le feu.
L'utilisation des robots de poste apporte des avantages pour la sécurité du personnel, améliorent l'efficacité dans l'exploitation et la maintenance, et fournissent des informations utiles à la gestion des actifs. Le déploiement des robots dans les postes apporte une réponse efficiente aux problèmes de sécurité, de manque de personnel, de risques sur site, et au fonctionnement sans personnel.
Pour accroitre la qualité du produit et du service, et pour promouvoir une diffusion globale des robots de poste, il faut dégager entre la CEI, l'ISO, l'IEEE, etc., un consensus sur des normes internationales. Ces normes devront couvrir les spécifications techniques des systèmes de robots, et les interfaces entre les robots et les infrastructures des compagnies d'électricité. Ceci permettra d'assurer des services plus fiables, d'éliminer des développements redondants, et d'abaisser les coûts d'investissement et de maintenance.
Other Technical Brochures